cyclops 도킹 모드
저자:OSubMarin마지막 업데이트:2024-03-29 04:32:23332.8K4.4MB

모드 소개
사이클로프를 어떤 기지에 도킹하는 것을 즐기세요. 하이노티카의 첫 번째 변형 기지로! 빠른 기본/사이클로프 전환, 사이클로프 파워셀의 자동 충전 및 전체 자동 파일럿 모드를 허용합니다.
노틸러스 설치 설명서 (정규 해양 아래의 버전):
1) bepinex fro 설치m .
2) 노틸러스를 설치 이 링크.
3) 다운로드 이 모드의 최신 버전그리고 아카이브를 추출합니다 (이름의 폴더를 줄 것입니다. 사이클로프 도킹 모드여러 가지 파일이 들어 있습니다.).
4) 폴더 이동 사이클로프 도킹 모드 폴더 내부 "[...]/Subnautica/BepInEx/plugins".
sml 도움말의 설치 지침 (정규 subnautica 버전):
1) bepinex fro 설치m .
2) sml 도움말 설치 이 링크.
3) 다운로드 버전 2.0.7 이 모드의그리고 아카이브를 추출합니다 (이름의 폴더를 줄 것입니다. 다양한 파일이 들어 있습니다.).
4) 폴더 이동 사이클로프 도킹 모드 폴더 내부 "[...]/Subnautica/BepInEx/plugins".
sml 도움말의 설치 지침 (유산 subnautica 버전):
1) qmods 설치 이 링크.
2) 설치 레거시 버전 (최신 버전이 아닙니다) SML 도우미의 이 링크.
3) 다운로드 버전 1.1.2 이 모드의그리고 아카이브를 추출합니다. (이름의 폴더를 줄 것입니다. 여러 가지 파일이 들어 있습니다.).
4) 폴더 이동 사이클로프 도킹 모드 폴더 내부 "[...] /Subnautica/QMods".
업데이트 지침:
설치 지침과 같은 단계 3에서 시작하십시오.
4단계에서 파일을 바꾸고 싶은지 묻습니다. 예를 들면 그래.
설명:
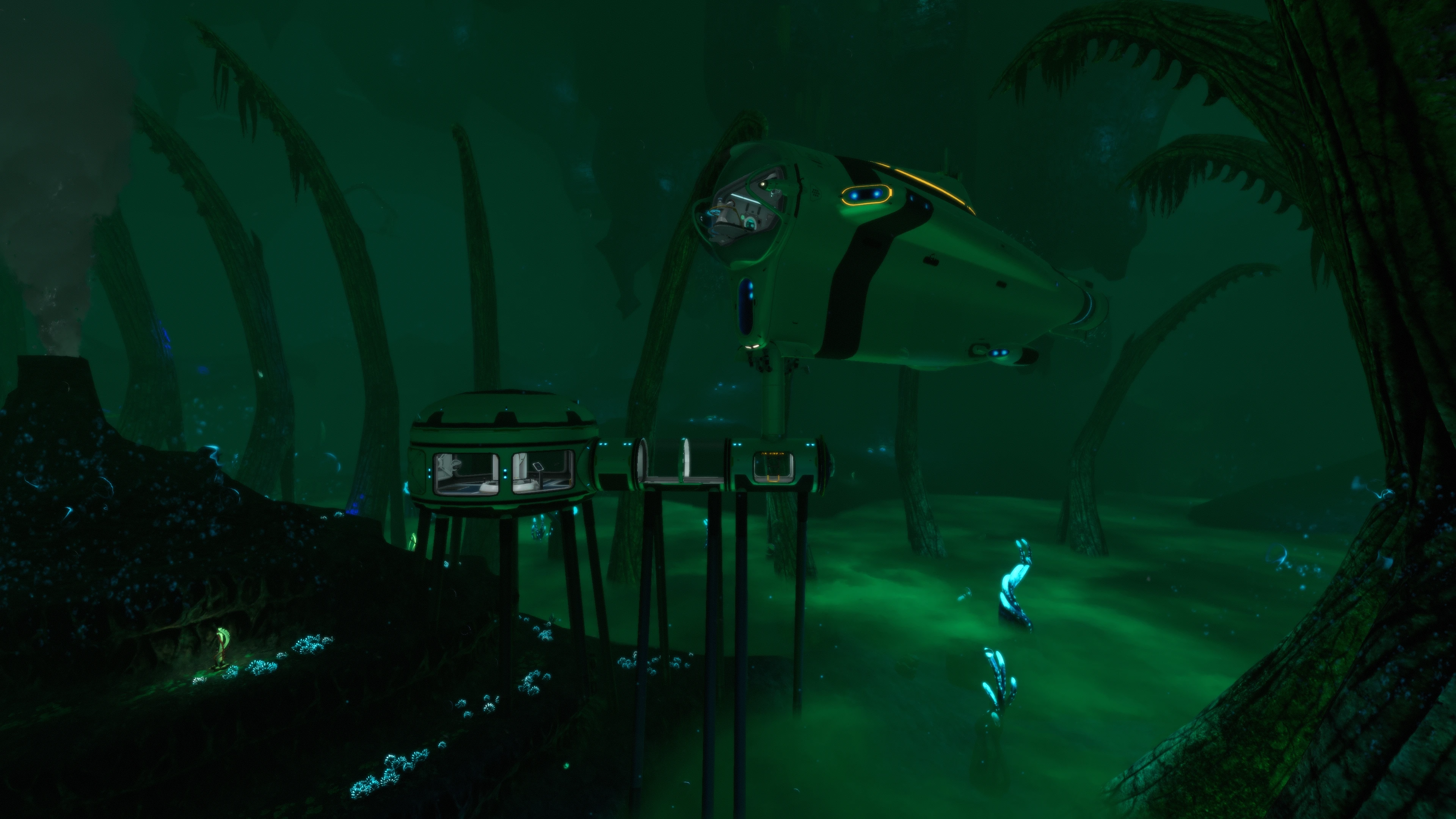
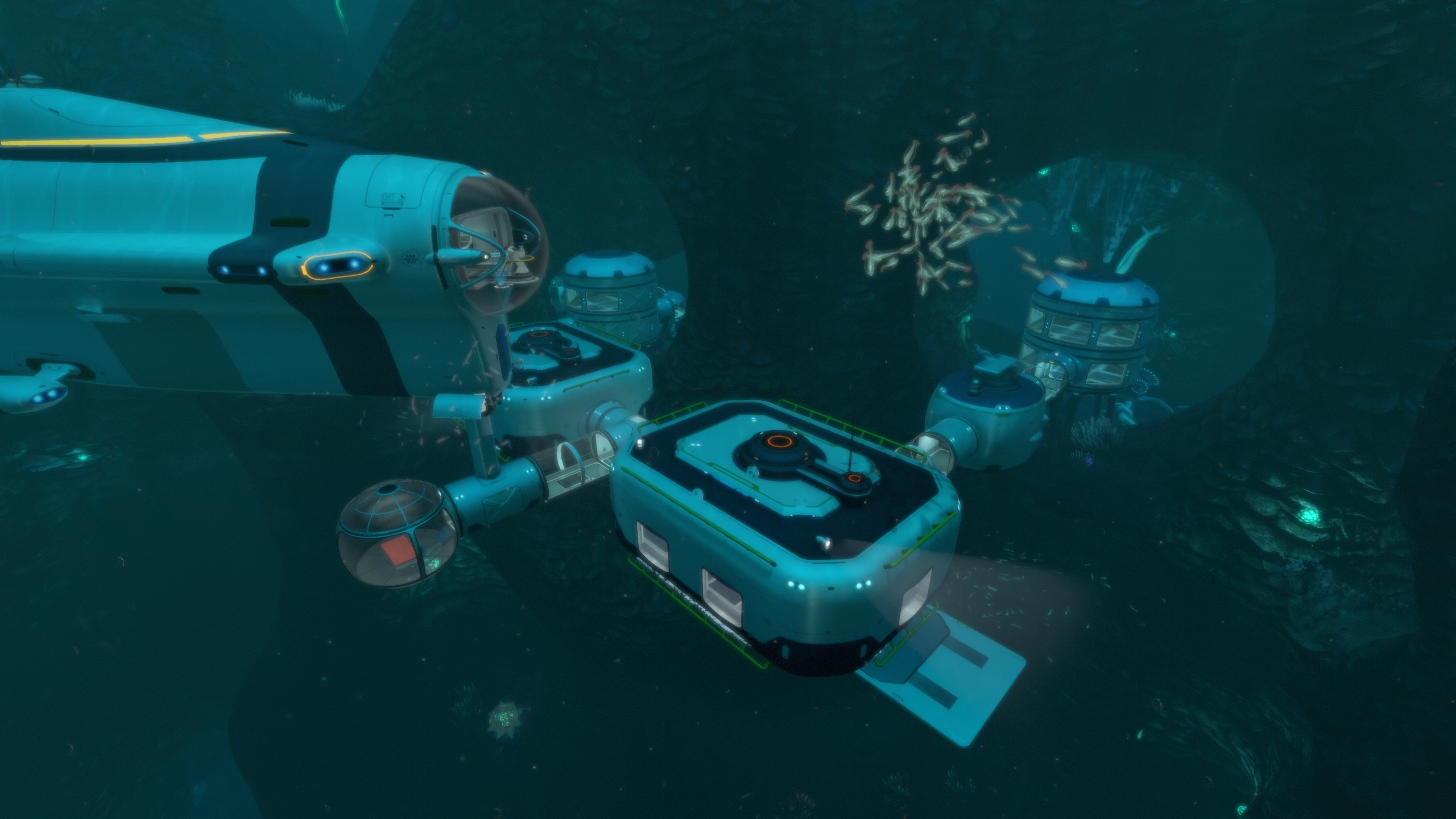
사이클로프를 사이클로프 도킹 해치 베이스(기본 범위는 13미터)에 충분히 가깝게 만들면 자동 조종 모드가 사이클로프를 제어하여 도킹할 수 있습니다. 사이클로프스가 도킹되면 기지가 에너지를 가지고 있다면 그 파워셀은 충전될 것이다.
사이클로프의 도킹을 해제하려면 엔진을 시작하고 종료 키를 누르기만 하십시오 (기본적으로).
사이클로프가 도킹 또는 해제 애니메이션에서 30초 이상 걸린 경우 종료 키를 3번 눌러 중단할 수 있습니다.
이 모드는 두 가지 새로운 개념의 증명을 나타냅니다.
= > subnautica를 위한 첫 번째 변형 기본 조각은 사용자 정의 기본 조각이 가능하다는 것을 증명합니다.
=>사이클로프스를 위한 첫 번째 자동 조종 모드로, 이 잠수함 움직임이 스크립트될 수 있다는 것을 증명합니다.
구성:
대부분의 설정은 게임 중에 설정 메뉴에서 직접 변경할 수 있습니다(메뉴를 열 기본 키는 F7). 구성할 수 있는 목록은 다음과 같습니다.
-자동 도킹 트리거 범위(기본적으로 13m).
-수동 또는 자동 도킹(기본적으로 자동 도킹).
-도킹 키 시작(기본적으로 문자 "o", 수동 도킹이 활성화된 경우에만 작동합니다).
-파워셀의 충전 속도(기본적으로 30초마다 약 1%)입니다.
-사다리 색상(기본적으로 색상이 없음). 게임 중에 사다리 색조를 수정하는 경우, 새 색조를 볼 수 있도록 베이스의 시각적 새로 고침을 촉발해야 합니다(예: 창을 해체/재구성).
-기본 표시 구성(기본적으로 배경이 있는 노란색). 또한 각 기호의 스타일을 수동으로 수정할 수 있습니다(게임 저장/재시작 시 스타일 구성을 유지합니다).
설정을 변경할 수도 있습니다. 텍스트 파일 (기본적으로 "[...] /Subnautica/BepInEx/plugins/CyclopsDockingMod" 폴더 안에 있습니다.). 이거 구성 텍스트 파일에는 다음과 같은 추가 설정도 포함되어 있습니다.
-mod 설정 키(mod 설정을 열는 데 사용되는 키보드 키를 수정할 수 있습니다. 기본적으로 F7).
-레시피 (사이클로프 도킹 해치 베이스를 만들기 위해 필요한 재료를 수정할 수 있다).
-자동 조종기 기능 활성화(자동 조종기 기능을 활성화하거나 비활성화할 수 있습니다).
-language string(이 mod의 언어를 변경할 수 있습니다).
자동 조종 경로를 생성하는 방법:
1) 새로운 노선을 기록하기 위해 당신의 사이클로프를 사이클로프 도킹 해치 기반에 도킹해야 합니다. 이것을 "".
2) 사이클로프 스티어링 휠이 아직 없다면 (사이클로프 후드가 나타나도록) 손에 쥐고 화살표 버튼을 사용하여 "새 경로"를 선택합니다.
3) 이제 스티어링 휠 버튼을 클릭하여 경로 기록을 시작하십시오 (자동으로 사이클로프를 해제하고 녹음을 시작합니다).
4) 경로가 끝나기를 원하는 곳으로 가면 사이클로프 도킹 해치나 무작위 위치일 수 있습니다.
뉴스 및 업데이트:
2024년 3월 28일: 여러 버그 수정 (자세한 내용은 변경 로그 참조).
2024년 3월 12일: 노틸러스의 대체 버전이 추가되었습니다.
...
2020년 9월 5일: nexusmods에서 초기 릴리스.
특별히 감사합니다:
알 수 없는 세계 엔터테인먼트 해양 아래의 발전을 위한 것입니다.
MrPurple6411 그리고 소방자는 노틸러스의 대체 버전을 제공하는 데 도움을 주었습니다.
질문이 있으면 제 discord 서버에 가입하십시오. https://discord.gg/WDvjt7csWh
또는 불화에 대해 직접 연락하십시오: 오바마린
해양 아래의 cyclops 도킹 모드
노틸러스 설치 설명서 (정규 해양 아래의 버전):
1) bepinex fro 설치m .
2) 노틸러스를 설치 이 링크.
3) 다운로드 이 모드의 최신 버전그리고 아카이브를 추출합니다 (이름의 폴더를 줄 것입니다. 사이클로프 도킹 모드여러 가지 파일이 들어 있습니다.).
4) 폴더 이동 사이클로프 도킹 모드 폴더 내부 "[...]/Subnautica/BepInEx/plugins".
sml 도움말의 설치 지침 (정규 subnautica 버전):
1) bepinex fro 설치m .
2) sml 도움말 설치 이 링크.
3) 다운로드 버전 2.0.7 이 모드의그리고 아카이브를 추출합니다 (이름의 폴더를 줄 것입니다. 다양한 파일이 들어 있습니다.).
4) 폴더 이동 사이클로프 도킹 모드 폴더 내부 "[...]/Subnautica/BepInEx/plugins".
sml 도움말의 설치 지침 (유산 subnautica 버전):
1) qmods 설치 이 링크.
2) 설치 레거시 버전 (최신 버전이 아닙니다) SML 도우미의 이 링크.
3) 다운로드 버전 1.1.2 이 모드의그리고 아카이브를 추출합니다. (이름의 폴더를 줄 것입니다. 여러 가지 파일이 들어 있습니다.).
4) 폴더 이동 사이클로프 도킹 모드 폴더 내부 "[...] /Subnautica/QMods".
업데이트 지침:
설치 지침과 같은 단계 3에서 시작하십시오.
4단계에서 파일을 바꾸고 싶은지 묻습니다. 예를 들면 그래.
설명:
사이클로프를 사이클로프 도킹 해치 베이스(기본 범위는 13미터)에 충분히 가깝게 만들면 자동 조종 모드가 사이클로프를 제어하여 도킹할 수 있습니다. 사이클로프스가 도킹되면 기지가 에너지를 가지고 있다면 그 파워셀은 충전될 것이다.
사이클로프의 도킹을 해제하려면 엔진을 시작하고 종료 키를 누르기만 하십시오 (기본적으로).
사이클로프가 도킹 또는 해제 애니메이션에서 30초 이상 걸린 경우 종료 키를 3번 눌러 중단할 수 있습니다.
이 모드는 두 가지 새로운 개념의 증명을 나타냅니다.
= > subnautica를 위한 첫 번째 변형 기본 조각은 사용자 정의 기본 조각이 가능하다는 것을 증명합니다.
=>사이클로프스를 위한 첫 번째 자동 조종 모드로, 이 잠수함 움직임이 스크립트될 수 있다는 것을 증명합니다.
구성:
대부분의 설정은 게임 중에 설정 메뉴에서 직접 변경할 수 있습니다(메뉴를 열 기본 키는 F7). 구성할 수 있는 목록은 다음과 같습니다.
-자동 도킹 트리거 범위(기본적으로 13m).
-수동 또는 자동 도킹(기본적으로 자동 도킹).
-도킹 키 시작(기본적으로 문자 "o", 수동 도킹이 활성화된 경우에만 작동합니다).
-파워셀의 충전 속도(기본적으로 30초마다 약 1%)입니다.
-사다리 색상(기본적으로 색상이 없음). 게임 중에 사다리 색조를 수정하는 경우, 새 색조를 볼 수 있도록 베이스의 시각적 새로 고침을 촉발해야 합니다(예: 창을 해체/재구성).
-기본 표시 구성(기본적으로 배경이 있는 노란색). 또한 각 기호의 스타일을 수동으로 수정할 수 있습니다(게임 저장/재시작 시 스타일 구성을 유지합니다).
설정을 변경할 수도 있습니다. 텍스트 파일 (기본적으로 "[...] /Subnautica/BepInEx/plugins/CyclopsDockingMod" 폴더 안에 있습니다.). 이거 구성 텍스트 파일에는 다음과 같은 추가 설정도 포함되어 있습니다.
-mod 설정 키(mod 설정을 열는 데 사용되는 키보드 키를 수정할 수 있습니다. 기본적으로 F7).
-레시피 (사이클로프 도킹 해치 베이스를 만들기 위해 필요한 재료를 수정할 수 있다).
-자동 조종기 기능 활성화(자동 조종기 기능을 활성화하거나 비활성화할 수 있습니다).
-language string(이 mod의 언어를 변경할 수 있습니다).
자동 조종 경로를 생성하는 방법:
1) 새로운 노선을 기록하기 위해 당신의 사이클로프를 사이클로프 도킹 해치 기반에 도킹해야 합니다. 이것을 "".
2) 사이클로프 스티어링 휠이 아직 없다면 (사이클로프 후드가 나타나도록) 손에 쥐고 화살표 버튼을 사용하여 "새 경로"를 선택합니다.
3) 이제 스티어링 휠 버튼을 클릭하여 경로 기록을 시작하십시오 (자동으로 사이클로프를 해제하고 녹음을 시작합니다).
4) 경로가 끝나기를 원하는 곳으로 가면 사이클로프 도킹 해치나 무작위 위치일 수 있습니다.
- 경로를 무작위 위치로 끝내려면 스티어링 휠 버튼을 다시 클릭하여 녹화를 중지합니다.
- 경로가 cyclops 도킹 해치에서 끝나기를 원한다면, 그것에 도킹하면 됩니다(녹화는 자동으로 중지됩니다).
뉴스 및 업데이트:
2024년 3월 28일: 여러 버그 수정 (자세한 내용은 변경 로그 참조).
2024년 3월 12일: 노틸러스의 대체 버전이 추가되었습니다.
...
2020년 9월 5일: nexusmods에서 초기 릴리스.
특별히 감사합니다:
알 수 없는 세계 엔터테인먼트 해양 아래의 발전을 위한 것입니다.
MrPurple6411 그리고 소방자는 노틸러스의 대체 버전을 제공하는 데 도움을 주었습니다.
"배에 오신 것을 환영합니다, 선장."
-사이클로프 아이
-사이클로프 아이
질문이 있으면 제 discord 서버에 가입하십시오. https://discord.gg/WDvjt7csWh
또는 불화에 대해 직접 연락하십시오: 오바마린
본 도구는 타사 [bufftool]에서 제공합니다.

지금 모드를 다운로드하세요
LagoFast를 설치하고 Subnautica을(를) 시작한 후 좋아하는 모드로 플레이해 보세요.